本篇目录:
激光雷达数据如何处理
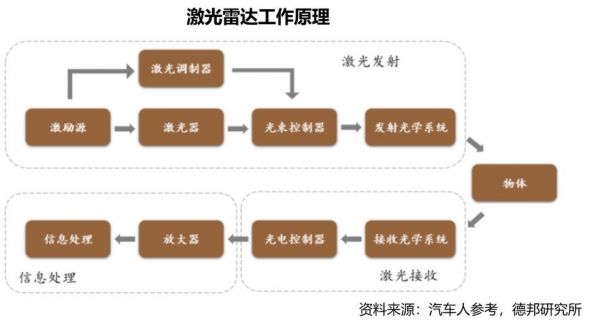
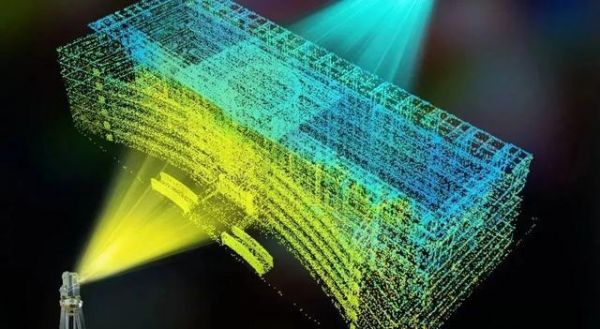
.地面激光雷达内业数据预处理的主要工作是:基站数据转换。POS数据处理。激光点云解算。精度验证。生成具有三维地理空间坐标的激光点云。激光雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统。
启动激光雷达设备,开始进行点云数据采集。在采集过程中,需要对激光雷达设备进行监控和维护,例如检查设备的工作状态、激光雷达和坐标传感器的坐标转换关系等。采集完成后,需要对点云数据进行预处理,例如去除噪声、平滑、分割等。
-图1")
在数据处理阶段,激光雷达会把已经采集到的数据发送到计算机进行处理。然后通过SLAM算法,提取数据中的特征并建立地图,同时对机器人的位置进行估计。
需要注意的是,宏程序的实现需要考虑效率和准确性,避免对正常点云数据进行误处理。 验证和优化:在实现宏程序后,需要进行验证和优化。通过对不同场景的激光雷达数据进行测试,验证宏程序的效果和准确性。
基于栅格图的点云处理方式是通过将三维点云数据投影到地面,建立多个栅格单元,采用连通区域标记算法或者邻域膨胀策略对目标进行聚类,这类方法被广泛应用在激光雷达三维建模中。
雷达频率调制相位调制原理复合调制性能对比?
1、相位调制也是一种常见的脉内调制方式,利用相位变化来完成信息传输。在雷达脉冲传递过程中,对其进行相位调制,能够产生一种时域上波形重叠的效果,增强了雷达信号的分辨率和抗噪性。通常使用毫米波、毫米波段以上的频率来实现。
2、所谓频率调制,就是指高频载波的瞬时频率偏移随调制信号m(t)的幅度作线性变化,该已调信号称为调频信号。所谓相位调制,就是指高频载波的瞬时相位偏移随调制信号m(t)的幅度作线性变化,该已调信号称为调相信号。
3、所谓频率调制,顾名思义,就是对无线电进行信息加载,得到调制波。但是,随着无线电技术的另一个领域,既雷达设备,由于对目标测绘的需要,和电子信息对抗的必要。
激光雷达主机输出的信号通过网线传输到
1、毫米波雷达还在用CAN,因为雷达都会对原始数据做预处理,实际输出的是目标列表,数据量很小,采用CAN网络进行传输就足够,技术成熟,应用广泛,无缝兼容。
2、在需要被保护的固定区域安装周界防护报警系统后,当有人企图穿越被保护区域四周的边界时,边界上的探测装置探测到入侵后发出入侵警报信号,同时通过传输部分将入侵信号发送至报警联动部分提示相关人员处理。
3、通信领域:半导体激光器是光通信系统中的关键组件之一,用于光纤通信和光导波导通信。它们能够产生稳定的光信号,用于数据传输和光网络中的激光器器件。
4、这里面又可以分为输入层,包括不同的传感器,例如前视、周视、鱼眼、激光雷达等。
5、其中,TIN网络端到端输出信号灯的应用,通过持续增加的入口闭环训练,在泛化测试中准确率已经达到了98%;NPN网络通过车端算法自动生成路口特征,经过城市的实测,基本可以覆盖96%以上的路口位置。
6、在无人驾驶汽车上面,结合两种激光雷达是通常使用的办法,以此来准确实现障碍物的探测和完成保证汽车安全通过预定行程的功能。激光雷达应用于汽车感知时,具有测量精度高、响应时间短、抗干扰能力强的优势。
到此,以上就是小编对于雷达检测系统的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏